

Đo và điều khiển dễ dàng cho bơm bù và bơm chính
Bơm chính (duty pump) là loại bơm được sử dụng trong một hệ thống hoặc một quá trình với thời gian vận hành gần như là toàn bộ.
Tuy nhiên, trong suốt chế độ vận hành cao điểm, khi yêu cầu cung cấp lưu lượng dòng chảy vượt quá khả năng của bơm ở đầu ra, cần có một bơm bù (assist pump) hỗ trợ để bù đắp công suất thiếu hụt này.
Đây là yêu cầu thực tiễn rất phổ biến đối với ứng dụng trong ngành Nước và xử lý nước thải nói chung khi xảy ra hiện tượng vận hành trên tải, tức là khi có yêu cầu vận hành cao điểm đối với lưu lượng đầu ra của bơm.
Khi đó, bơm bù sẽ được chuyển sang chế độ vận hành tích cực và nó sẽ được ngắt vận hành khi mà thời điểm có yêu cầu vận hành cao điểm đi qua.
Vấn đề quan trọng ở đây là bơm chính và bơm bù phải được điều khiển phối hợp một cách chặt chẽ.
Một hệ thống điều khiển phối kết hợp sơ sài có thể khiến hệ thống bơm vận hành thiếu ổn định, nhịp nhàng và gây các dao động không mong muốn.
Do vậy, việc thiết lập một hệ thống điều khiển kết hợp chặt chẽ hai loại bơm này là vô cùng quan trọng nhằm duy trì vận hành nhịp nhàng trong cả hai chế độ bật hay tắt bơm bù.
Với bộ điều khiển đa năng CM30 hoặc CM50, việc thiết lập hệ thống bơm chính – bơm bù trở nên vô cùng giản đơn nhờ nguyên lý phân chia đầu ra.

Điều khiển đơn nhiệm hoặc điều khiển phối hợp với bơm bù
Chẳng hạn, quy trình công nghệ yêu cầu có hai kết quả đầu ra vật lý riêng với hai bơm được điều khiển khác nhau.
Tuy nhiên yêu cầu hoạt động và chế độ vận hành có liên quan đến nhau. Ta có thể sử dụng một mạch điều khiển PID để phối hợp hoạt động của hai bơm với nhau.
Bộ điều khiển PID sẽ chia làm hai dải điều khiển. Khi nhu cầu lưu lượng mổi chất vượt quá một giá trị đặt trước thì bộ điều khiển sẽ phân công bơm bù hoạt động để đảm bảo yêu cầu công nghệ.
Khi yêu cầu dưới mức giá trị đặt thì bơm bù sẽ nghỉ và chỉ có bơm chính làm việc để đạt tỷ lệ lưu lượng đầu ra theo yêu cầu. Chính sự phối hợp này cũng nâng cao hiệu quả chi phí vận hành bảo dưỡng và nâng cao tuổi thọ bơm do bơm chính không phải chạy quá công suất.
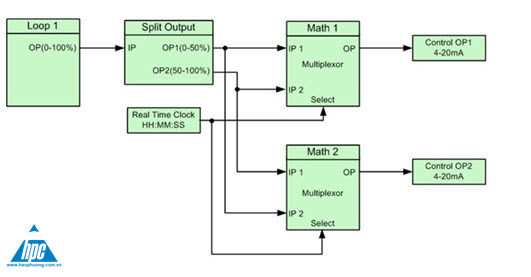
Trong ví dụ này, giá trị đặt từ 0-100% tương ứng với 2 giá trị đầu ra của bộ PID. Trong đó, bơm chính và bơm bù được chia dải điều khiển để phối hợp đáp ứng yêu cầu công nghệ.
Trong dải từ 0-50% thì chỉ có bơm chính chạy và đầu ra số 2 của PID được giữ bằng 0. Khi vượt quá dải đặt này, bơm bù sẽ được đưa vào hoạt động cùng để đáp ứng công suất bơm yêu cầu.















